PID (Proportional-Integral-Derivative) Controller
PID (Proportional-Integral-Derivative) Controller
Intrumentasi
dan control industri tentu tidak lepas dari sistem instrumentasi sebagai
pengontrol yang digunakan dalam keperluan pabrik. Sistem kontrol pada pabrik
tidak lagi manual seperti dahulu, tetapi saat sekarang ini telah dibantu dengan
perangkat kontroler sehingga dalam proses produksinya suatu pabrik bisa lebih
efisien dan efektif. Kontroler juga berfungsi untuk memastikan bahwa setiap
proses produksi terjadi dengan baik.
PID
(Proportional–Integral–Derivative controller) merupakan kontroler untuk
menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan
balik pada sistem tesebut. Pengontrol PID adalah pengontrol konvensional
yang banyak dipakai dalam dunia industri. Pengontrol PID akan memberikan
aksi kepada Control Valve berdasarkan besar error yang diperoleh. Control valve
akan menjadi aktuator yang mengatur aliran fluida dalam proses industri yang
terjadi Level air yang diinginkan disebut dengan Set Point. Error adalah
perbedaan dari Set Point dengan level air aktual.

Adapun persamaan Pengontrol PID adalah :

Keterangan :
mv(t) = output dari pengontrol PID atau Manipulated
Variable
Kp = konstanta Proporsional
Ti = konstanta Integral
Td = konstanta Detivatif
e(t) = error (selisih antara set point
dengan level aktual)
Persamaan
Pengontrol PID diatas dapat juga dituliskan sebagai berikut :

dengan :

Untuk lebih
memaksimalkan kerja pengontrol diperlukan nilai batas minimum dan maksimum yang
akan membatasi nilai Manipulated Variable yang dihasilkan.
Komponen
kontrol PID ini terdiri dari tiga jenis yaitu Proportional, Integratif dan
Derivatif. Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri tergantung
dari respon yang kita inginkan terhadap suatu plant.
1. Kontrol
Proporsional
Kontrol P
jika G(s) = kp, dengan k adalah konstanta.
Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time. Pengontrol proporsional memiliki keluaran yang sebanding/proporsional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya).
Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time. Pengontrol proporsional memiliki keluaran yang sebanding/proporsional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya).
Ciri-ciri
pengontrol proporsional :
- Jika
nilai Kp kecil, pengontrol proporsional hanya mampu melakukan koreksi
kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat
(menambah rise time).
- Jika
nilai Kp dinaikkan, respon/tanggapan sistem akan semakin cepat mencapai
keadaan mantapnya (mengurangi rise time).
- Namun
jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan, akan
mengakibatkan sistem bekerja tidak stabil atau respon sistem akan
berosilasi.
- Nilai
Kp dapat diset sedemikian sehingga mengurangi steady state error, tetapi
tidak menghilangkannya.
2.Kontrol
Integratif
Pengontrol
Integral berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan
mantap nol (Error Steady State = 0 ). Jika sebuah pengontrol tidak memiliki
unsur integrator, pengontrol proporsional tidak mampu menjamin keluaran sistem
dengan kesalahan keadaan mantapnya nol.
Jika G(s)
adalah kontrol I maka u dapat dinyatakan sebagai u(t)=[integral e(t)dT]Ki
dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s) dapat
dinyatakan sebagai u=Kd.[delta e/delta t]
Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde system
Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde system
Keluaran
pengontrol ini merupakan hasil penjumlahan yang terus menerus dari perubahan
masukannya. Jika sinyal kesalahan tidak mengalami perubahan, maka keluaran akan
menjaga keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran
pengontrol integral merupakan luas bidang yang dibentuk oleh kurva kesalahan /
error.
Ciri-ciri
pengontrol integral :
- Keluaran
pengontrol integral membutuhkan selang waktu tertentu, sehingga pengontrol
integral cenderung memperlambat respon.
- Ketika
sinyal kesalahan berharga nil, keluaran pengontrol akan bertahan pada
nilai sebelumnya.
- Jika
sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan
atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai
Ki.
- Konstanta
integral Ki yang berharga besar akan mempercepat hilangnya offset. Tetapi
semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi
dari sinyal keluaran pengontrol.
3.Kontrol
Derivatif
Keluaran
pengontrol diferensial memiliki sifat seperti halnya suatu operasi derivatif.
Perubahan yang mendadak pada masukan pengontrol akan mengakibatkan perubahan
yang sangat besar dan cepat. Ketika masukannya tidak mengalami perubahan,
keluaran pengontrol juga tidak mengalami perubahan, sedangkan apabila sinyal
masukan berubah mendadak dan menaik (berbentuk fungsi step),
keluaran menghasilkan sinyal berbentuk impuls. Jika sinyal masukan berubah naik
secara perlahan (fungsi ramp), keluarannya justru merupakan fungsi
step yang besar magnitudenya sangat dipengaruhi oleh kecepatan naik dari
fungsi ramp dan factor konstanta Kd.
Sinyal
kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai G(s)=s.Kd
Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks
“kecepatan” atau rate dari error. Dengan sifat ini ia dapat digunakan untuk
memperbaiki respon transien dengan memprediksi error yang akan terjadi. Kontrol
Derivative hanya berubah saat ada perubahan error sehingga saat error statis
kontrol ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler
Derivative tidak dapat dipakai sendiri
Ciri-ciri
pengontrol derivatif :
- Pengontrol
tidak dapat menghasilkan keluaran jika tidak ada perubahan pada masukannya
(berupa perubahan sinyal kesalahan)
- Jika
sinyal kesalahan berubah terhadap waktu, maka keluaran yang dihasilkan
pengontrol tergantung pada nilai Kd dan laju perubahan sinyal kesalahan.
- Pengontrol
diferensial mempunyai suatu karakter untuk mendahului, sehingga pengontrol
ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit
kesalahan menjadi sangat besar. Jadi pengontrol diferensial dapat
mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat
korektif dan cenderung meningkatkan stabilitas sistem.
- Dengan
meningkatkan nilai Kd, dapat meningkatkan stabilitas sistem dan mengurangi
overshoot.
Berdasarkan
karakteristik pengontrol ini, pengontrol diferensial umumnya dipakai untuk
mempercepat respon awal suatu sistem, tetapi tidak memperkecil kesalahan pada
keadaan tunaknya. Kerja pengontrol diferensial hanyalah efektif pada lingkup
yang sempit, yaitu pada periode peralihan. Oleh sebab itu pengontrol
diferensial tidak pernah digunakan tanpa ada kontroler lainnya.
Efek dari
setiap pengontrol Proporsional, Integral dan Derivatif pada sistem lup tertutup
disimpulkan pada table berikut ini :

Setiap
kekurangan dan kelebihan dari masing-masing pengontrol P, I dan D dapat saling
menutupi dengan menggabungkan ketiganya secara paralel menjadi pengontrol
proporsional plus integral plus diferensial (pengontrol PID). Elemen-elemen
pengontrol P, I dan D masing-masing secara keseluruhan bertujuan :
- mempercepat
reaksi sebuah sistem mencapai set point-nya
- menghilangkan
offset
- menghasilkan
perubahan awal yang besar dan mengurangi overshoot.
Kita coba
ambil contoh dari pengukuran temperatur, setelah terjadinya pengukuran dan
pengukuran kesalahan maka kontroler akan memustuskan seberapa banyak posisi tap
akan bergeser atau berubah. Ketika kontroler membiarkan valve dalam keadaan
terbuka, dan bisa saja kontroler membuka sebagian dari valve jika hanya
dibutuhkan air yang hangat, akan tetapi jika yang dibutuhkan adalah air panas,
maka valve akan terbuka secara penuh. Ini adalah contoh dari proportional
control. Dan jika ternyata dalam prosesnya air panas yang diharapkan ada
datangnya kurang cepat maka controler bisa mempercepat proses pengiriman air
panas dengan membuka valve lebih besar atau menguatkan pompa, inilah yang
disebut dengan intergral kontrol.
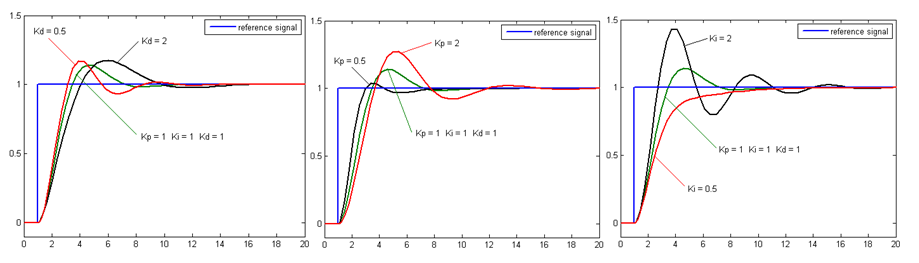
Karakteristik
pengontrol PID sangat dipengaruhi oleh kontribusi besar dari ketiga parameter
P, I dan D. Penyetelan konstanta Kp, Ki dan Kd akan mengakibatkan penonjolan
sifat dari masing-masing elemen. Satu atau dua dari ketiga konstanta tersebut
dapat disetel lebih menonjol disbanding yang lain. Konstanta yang menonjol
itulah akan memberikan kontribusi pengaruh pada respon sistem secara
keseluruhan.
Adapun
beberapa grafik dapat menunjukkan bagaimana respon dari sitem terhadap perubahan
Kp, Ki dan Kd sebagai berikut :
PID
Controler adalah controler yang penting yang sering digunakan dalam
industri. Sistem pengendalian menjadi bagian yang tidak bisa terpisahkan
dalam proses kehidupan ini khususnya dalam bidang rekayasa industri, karena
dengan bantuan sistem pengendalian maka hasil yang diinginkan dapat
terwujud. Sistem pengendalian dibutuhkan untuk memperbaiki tanggapan
sistem dinamik agar didapat sinyal keluaran seperti yang diinginkan. Sistem
kendali yang baik mempunyai tanggapan yang baik terhadap sinyal masukan yang
beragam.


{kind=link}
Komentar
Posting Komentar